We designed for a future where fully autonomous vehicles are the standard for transportation. Users have widely adopted the use of AV’s, but some users are apprehensive about making the switch.
What Does a Future of Fully Autonomous Vehicles Look Like?
Vehicles are fully automated. User control is not available. Driving is executed by the AV using an internal process of perception via sensors, and motion planning/motion execution using the AV’s algorithmic processing system.
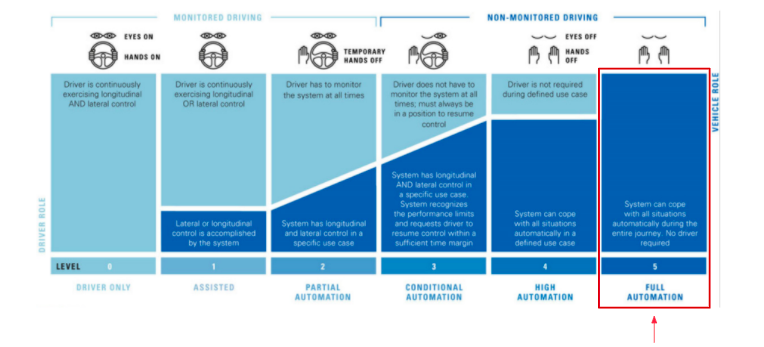
Here’s what the degrees of automation look like for vehicles based on today’s standards:
The first 3 levels of vehicle automation are considered Monitored Driving, and are as follows: Level 0: Driver Only – Eyes On, Hands On The driver is continuously exercising longitudinal and lateral control Level 1: Assisted – Eyes On, Hands On The driver is mainly continuously exercising longitudinal OR lateral control. Minimal lateral or longitudinal control is accomplished by the vehicle. Level 2: Partial Automation – Eyes On, Temporary Hands Off The driver mostly has to monitor the system at all times. The system partially has longitudinal and lateral control in a specific use case. The second 3 levels of vehicle automation are considered Non-Monitored Driving, and are as follows: Level 3: Conditional Automation – Temporary Eyes Off, Temporary Hands Off The driver does not have to monitor the system at all times, but must always be in a position to resume control. The system has longitudinal and lateral control in a specific use case. The system recognizes the performance limits and requests driver to resume control within a sufficient time margin. Level 4: High Automation – Eyes Off, Hands Off The driver is not required during defined uses cases. The system can cope with all situations automatically in a defined use case. Level 5: Full Automation – Eyes Off, Hands Off System can cope with all situations automatically during the entire journey. No driver is required.
The AV Control Loop
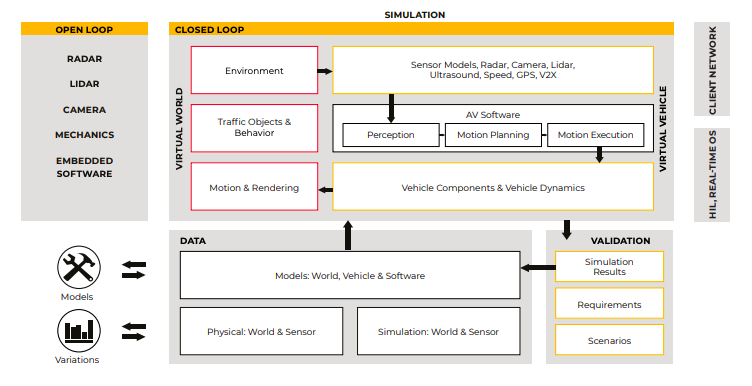
Autonomous vehicles and their algorithms are currently being processed by a variety of companies. These algorithms are being refined to create an effective AV Control loop. This refers to the process of perception, motion planning, and motion execution. Ansys is at the forefront of this development and their diagram the process:
Within the simulation’s closed loop, the environment communicates with the vehicle’s sensor models, radar, camera, lidar, ultrasound, speed, GPS, and V2X. These inputs communicate with the AV software, and complete steps of perception, motion planning, and motion execution. The software then communicates to the vehicle components and vehicle dynamics. The vehicle components and dynamics conduct a small subloop which communicates through validation steps, including simulation results, requirements, and scenarios, which then is transformed into data. The data contains models, including the world, vehicle, and software; the physical world and sensors; and the simulation’s world and sensors. This data completes the subloop, and the vehicle components and dynamics then pass information into motion and rendering. The virtual world also takes into account traffic objects and behavior.
By the time our product would be implemented, the algorithm testing phase of AV’s would be stable. Our design would simply convey the information from the AV Control Loop and display it through our interface to our users.
An Oligarchical Industry
Throughout history the automotive industry has resembled an oligarchy. We anticipate this to continue. Our product could be licensed or sold to a large manufacturer for use in their car models.
AV Regulation
Safety and implementation of AVs will be a considerable issue in the future. It is highly likely that regulators could create determining legislation that would dictate requirements of AVs. This could easily apply to our interface in the future. However, we have disregarded any potential onset of restricting regulation. The regulatory future of AVs is largely speculative at this point in time so it is a negligible concern.